3상 모터를 제어 하기 위한 Inverter 방식 종류 (연재)
| 기본 개념 | 여러 방식 비교 | 6 Step, SPWM, SVPWM 등 비교 | https://bahk33.tistory.com/230 | |
| PWM 에 대하여 | https://bahk33.tistory.com/215 | |||
| DQ 변환 | https://bahk33.tistory.com/218 | |||
| 스칼라와 벡터 비교 | 본글 https://bahk33.tistory.com/229 | |||
| 스칼라 | VF ( V/f, VVVF ) 인코더 사용 안함. |
Square Wave Inverter, Six Step Inverter |
VF,VVVF https://bahk33.tistory.com/216 | |
| SPWM, Sinusoidal PWM | SPWM https://bahk33.tistory.com/217 | |||
| 슬립 주파수 제어 SFC, Slip Freq Control 인코더 사용 |
||||
| DTC Direct Torque Control 스위칭 기반 |
SVM, SVPWM, Space Vector PWM | SVPWM https://bahk33.tistory.com/219 소스 https://bahk33.tistory.com/231 |
||
| PTC, MPC 기반 DTC | ||||
| 벡터 | FOC Field-Oriented Control |
DFOC, 직접 벡터 제어 |
센서 , 인코더 사용 | |
| 센서리스, 인코더 사용 안함 |
||||
| IFOC 간접 벡터 제어 |
센서 | |||
| 센서리스 | ||||
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
이 글에서는 벡터 제어가 어떻게 안전하고 친숙하게 작동하는지 설명합니다 . 하지만 먼저 모터 드라이브를 논할 때 제어 가 무엇을 의미하는지 명확히 해야 합니다.
1. 통제할 것인가, 통제하지 않을 것인가
공원에서 당신의 반려견 피도를 산책하는 것을 상상해보세요.
반려견에게 목줄을 매어 놓았기 때문에, 반려견은 목줄의 길이에 맞춰 마음껏 돌아다닐 수 있습니다. 하지만 반려견은 당신이 걷는 길과 거의 같은 길을 따라갈 것입니다. 반려견을 잘 통제하고 있다고 생각하시나요 ? 하지만 그렇지 않습니다. 이러한 상황을 모터 구동 분야에서는 스칼라 제어 라고 합니다 .
스칼라 제어는 모터를 정확히 제어하는 것은 아니지만, 모터가 어떤 역할을 하는지 대략적으로 파악할 수 있다는 것을 의미합니다. 인버터는 전기 모터에 전압과 주파수를 공급하고, 모터는 마치 목줄에 묶인 피도처럼 그 입력에 반응합니다.
이제 피도를 스케이트보드에 붙이고 가죽줄을 강철 막대로 교체해 보겠습니다.
피도는 당신이 원하는 대로, 한 치 한 치 정확하게 움직일 것 입니다. 이것이 바로 벡터 제어 입니다 .
모터 드라이브의 경우, 컨트롤러가 언제든지 로터의 위치를 알고(FeedBack 에 의하여), 새로운 자기장을 생성하여 로터를 초당 수백(또는 수천) 번 원하는 방향으로 밀어냅니다.
반면 스칼라 제어는 로터의 위치를 전혀 알지 못하고(위치 감지 하지 않음), 모터에 속도 설정만 제공하며, 모터는 부하 변동 과 기타 내 외부 환경에 따라 따라 가는 구조 입니다.
이제 해당 부분을 명확하게 했으므로 Vector Control이 무엇을, 어떻게 하는지 정확히 설명해 드리겠습니다.
2. 로터 자기장 공개
벡터 제어에서 가장 중요한 부분은 회전자의 위치를 파악하는 것입니다. 여기서 위치란 회전자가 고정자 내부에 물리적으로 위치한다는 의미가 아니라, 회전자 자기장이 어느 방향을 향하고 있는지를 의미합니다. 유도 전동기(IM)가 자화되면 회전자에 유도 전압과 전류가 발생하여 자기장이 형성됩니다. 모든 전류의 자기장을 합하면 특정 방향을 향하는 순자기장 (NET field)이 생성됩니다. 이 방향은 인버터가 회전자를 더 밀기 위해 고정자 자기장을 어디에 배치해야 하는지를 결정하기 때문에 중요합니다 .
영구자석 동기 모터(PMSM)의 경우, 자기장은 회전자 자석에 의해 거의 일정하게 유지됩니다(약계자에 대해서는 언급 하지 않읍니다). 그럼에도 불구하고 자기장은 결정되어야 하며, 유도 모터와 PMSM 모두 동일한 방식으로 수행됩니다.
자기장의 실제 방향은 모터의 기전력(EMF)에 의해 결정되며, 이 기전력은 회전자 자기장에 의해 고정자 권선에 유도됩니다. 이 기전력은 회전자 저항/누설 인덕턴스와 직렬로, 자화 인덕턴스와 병렬로 연결된 전압원으로 작용합니다. 모터의 매개변수(고정자/회전자 저항 및 자화 인덕턴스)를 알고 있다면 기전력 값을 추정할 수 있습니다. 이 값은 벡터입니다. 즉, 크기와 방향을 가지며, 회전자의 순 자기장과 같은 방향을 가리킵니다 .
이 방향은 컨트롤러가 고정자의 자기장을 표시할 때 사용됩니다. 고정자 자기장의 목적은 일반 자석이 서로 끌어당기는 것과 같은 방식으로 회전자를 끌어당기는 것입니다. 회전자를 밀어내는 것도 가능하지만, 이 경우 자기장은 회전자 뒤에서 작용하여 개가 꼬리를 쫓는 것과 거의 같은 방식으로 회전자를 쫓습니다.
위 설명은 로터의 자기장 방향을 밝히는 과학적 방법을 완전히 다루지 않습니다.
3. 고정자와 회전자 자기장 사이의 최적 각도
회전자의 자기장이 결정되면 원하는 방향으로 회전자를 더 움직이기 위해 자기장을 어디에 적용할지 결정해야 합니다.
로터 필드가 90도 각도에 있다고 가정해 보겠습니다. 이는 북극이 (간단히 두 극으로 구성된 기계에서) 똑바로 위를 향하고 있음을 의미합니다.
이제 로터를 원하는 방향으로 밀기 위해 고정자 필드를 어디에 배치해야 할까요?
음, 주된 목표는 토크를 생성하는 것이므로, 고정자 필드를 회전자에 가장 큰 토크가 가해지는 방향으로 배치하고 싶습니다. 또한, 꼭 필요한 것보다 더 많은 전류를 사용 하고 싶지 않습니다 . 인버터 부품은 정격 전류에 따라 가격이 책정되기 때문에 전류는 한정된 자원입니다.
따라서 고정자 자기장이 회전자에 수직일 때 암페어당 최대 토크가 얻어집니다. 이 경우, 회전자를 어느 방향으로 움직이고 싶은지에 따라 180도 또는 0도입니다.
예를 들어 고정자 자기장을 회전자 자기장에서 단 10도 떨어뜨려 정렬하는 것은 충분히 가능하지만, 생성되는 토크는 훨씬 낮아지고 전류는 거의 동일합니다. 그다지 좋은 방법은 아니므로, 두 자기장 사이의 간격을 90도로 유지하는 것이 좋습니다.
4. 벡터 제어의 작업 흐름
벡터 제어의 제어 부분 은 일반적으로 두 가지 매우 기본적인 매개변수를 제어하는 PI 또는 PID 레귤레이터입니다.
- 1. 토크는 유효 전류 의 양으로 주어짐
- 2. 자기장(플럭스)은 무효 전류로 표현됩니다.
모터로 흐르는 전류는 세 가지이지만,
피상 전력을 유효 전력과 무효 전력으로 나누는 것과 똑같은 방식으로
이 3상 전류를 두 개의 서로 다른 직교 전류로 바꿀 수 있습니다 .
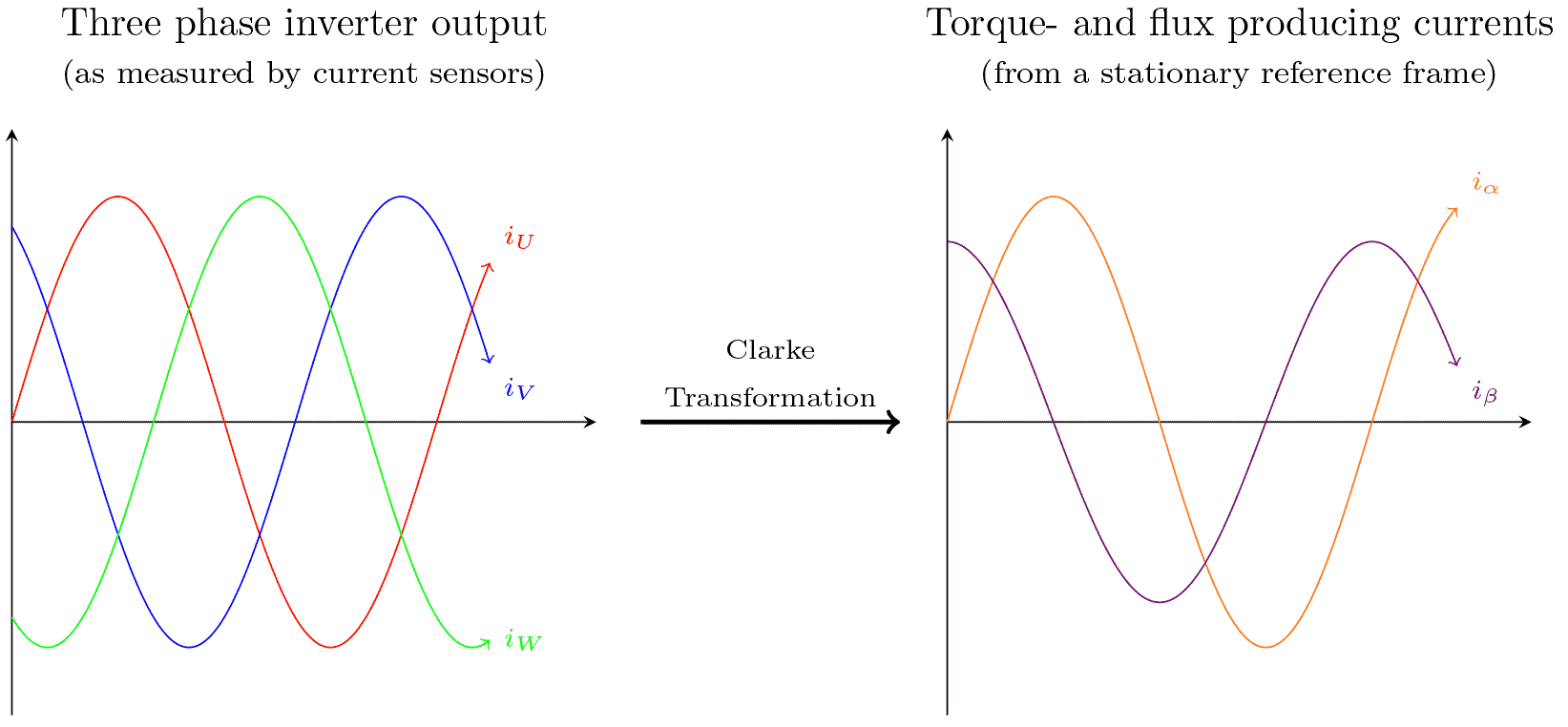
3상 전류를 토크를 생성하는 전류와 플럭스를 생성하는 전류로 변환하는 것을 클라크 변환( Clarke transformation )이라고 하며 다음과 같습니다.
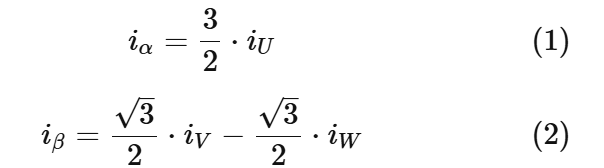
iu, iv그리고 iw 는 인버터에서 나오는 3상 전류를 나타냅니다. ia 그리고 iβ 는 각각 토크와 플럭스에 대한 두 개의 "새로운" 전류를 나타냅니다.
이는 토크와 자속 제어에 있어 큰 진전이지만, 아직 해결해야 할 과제가 하나 있습니다. 전류는 여전히 사인파이고, PI(또는 PID) 레귤레이터는 이러한 값을 제어하는 데 매우 어려움을 겪습니다. 전류는 끊임없이 변하기 때문입니다. 레귤레이터는 정상 상태 입력을 필요로 합니다.
하지만 잠깐만요. 컨트롤러는 이미 로터의 위치를 알고 있죠? 그 정보를 이용하면 몇 가지 삼각 함수를 사용하여 전류의 사인파 운동을 보상함으로써 사인파를 "상쇄"할 수 있습니다.

이 기법을 파크 변환(Park-transformation) 이라고 하며 , 기본적으로 제어기가 고정자 관점에서 회전하는 것을 관찰하는 대신 정상 상태에서 회전자의 관점을 경험할 수 있도록 합니다. 이를 " 정지 기준계 에서 회전 기준계 로 이동"이라고 합니다 .
마치 회전목마에서 말이 돌 때 그 옆에 서서 말을 보는 것과 같습니다. 그냥 회전목마에 뛰어올라 말 앞에 서서 말에 갇히는 게 훨씬 쉬울 텐데요, 그렇죠?
파크 변환은 두 교류 전류를 정상 상태의 직류 전류로 변환하고, 컨트롤러가 일반 PI 또는 PID 제어 루프를 사용하여 기계를 제어하는 것을 엄청나게 쉽게 만들어줍니다.
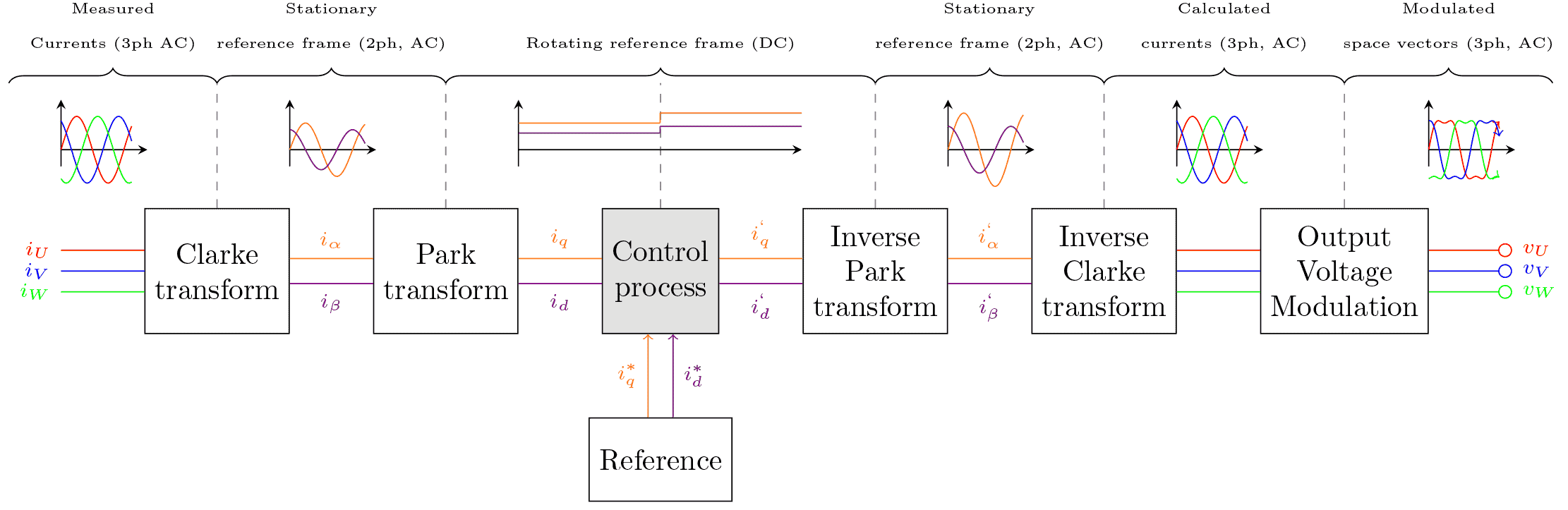
출력이 준비되면 전압 변조기를 사용하여 모터에 새로운 전류를 적용하기 전에 파크 변환과 클라크 변환을 모두 역전시킬 수 있습니다(공간 벡터 펄스 폭 변조에 대한 자체 문서 참조).
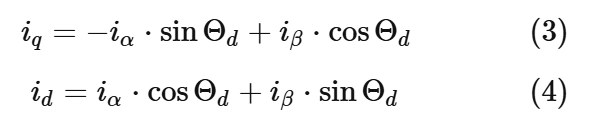
iq, id 는 토크를 생성하는 DC 전류와 필드를 생성하는 DC 전류입니다. Θ 는 로터 각도입니다.
벡터 제의 전체 작업 흐름은 아래와 같습니다.

5. 정리
벡터 제어는 전류 및 전압 측정을 사용하여 전기 모터를 제어하는 매우 일반적인 방법입니다. 이러한 측정값은 회전자 위치를 결정하고 모터 단자에 인가되는 새로운 3상 전압을 계산하는 데 사용됩니다. 이는 새로운 자기장을 생성하여 회전자를 아주 약간씩 움직이게 한 후, 새로운 측정값을 얻고 이 과정을 반복합니다.
- > 드라이브는 유도 전동기에서 두 가지 유형의 전류를 제어하려고 합니다.
- 1. 자기장을 생성하는 데 사용되는 무효 전류(PM 기계에서는 해당 없음)
- 2. 회전자를 돌리기 위한 토크를 생성하는 데 사용되는 활성 전류
- > 무효 전류는 거의 일정하며 플럭스 레귤레이터에 의해 제어됩니다. 일반적으로 기계 시동 시 토크 생성 전류에 앞서 무효 전류가 적용됩니다 .
- 1. 그러나 필드 약화가 필요한 경우에는 무효 전류가 감소합니다.
- 2. 무효 전류는 기계 정격 전류의 약 25%에서 35%입니다. 따라서 속도나 토크가 없더라도 기계에는 항상 그 양의 전류가 존재합니다. 자속 전류는 거의 순수 무효 전류이기 때문에 DC 버스나 인버터의 라인 측에서는 측정할 수 없습니다. 스위치(트랜지스터)에는 여전히 존재하지만, DC 측에서는 상쇄됩니다.
- > 유효 전류 는 속도, 출력 또는 토크를 제어하는 데 사용됩니다. 기준이 속도든 출력이든, 제어되는 것은 여전히 토크라는 점을 이해하는 것이 중요합니다. 예를 들어 속도가 너무 느리면 토크를 더 많이 적용하십시오.
- > 토크는 유효 전류량에 따라 직접 결정됩니다. 유효 전류량은 전압에 따라 결정됩니다.
> 전압이 높을수록 전류량이 많아지고 토크가 커져 속도 및/또는 출력이 증가합니다. - > 기계를 제어할 때, 구동 장치는 회전자의 위치를 알아야 합니다. 즉, 회전자 자속이 어느 방향을 "가리키는지" 알아야 합니다. 이는 수학적 모델과 전압 및 전류 측정을 통해 추정해야 합니다. 또한, 인코더를 통해 추정할 수도 있습니다.
- > VSD는 회전자 자속 벡터에 대한 전압 벡터를 인가하여 모터를 제어합니다. 이 기계를 시계라고 가정하면, 회전자 자속이 1시 방향을 가리킨다고 가정할 수 있습니다. 그러면 VSD는 12시 방향에 전압 벡터를 인가하여 고정자에 자기장을 형성하여 회전자를 "추적"하게 합니다. (실제 구동 장치에서는 고정자 벡터가 회전자 벡터보다 90° 앞이나 뒤에 위치하는 것이 일반적으로 암페어당 최대 토크를 얻을 수 있기 때문입니다.)
위의 루틴은 매우 빠르게 반복되고 있습니다.
- 1. 전류 및 전압 측정
- 2. 위의 측정값과 전압 및/또는 전류 모델을 기반으로 회전자 위치를 추정합니다.
- 3. 측정된 값을 DC-프레임(Clarke/park-변환)의 반응/활성 부분으로 변환
- 4. 고정자 전압 벡터를 적용할 위치(회전자로부터 90°)를 계산합니다.
- 5. 전압 벡터를 적용합니다(1단계 이후 회전자 위치가 변경되었다는 점을 고려).
- 6. 다시 시작
- > 출력 전압과 주파수는 비례적으로 변경해야 합니다. 기계의 자속량은 전압과 주파수의 관계(U/f)로 주어집니다. 자속을 일정하게 유지해야 하므로 전압과 주파수를 선형적으로 변경해야 합니다. 즉, 속도의 30% = 주파수의 30% = 전압의 30%가 됩니다. 이러한 관계가 필요한 이유는 권선 인덕턴스의 리액턴스가 주파수에 따라 달라지기 때문입니다. XL= 2πf
- > 저속(3Hz 미만)에서는 모터 전압이 매우 낮기 때문에 케이블과 권선의 노이즈와 저항성 전압 강하로 인해 정확한 전압 측정값을 얻는 것이 점점 더 어려워지고 있습니다. 이로 인해 모터 제어가 어려워지고, 이를 위해 엔코더가 필요합니다. 엔코더를 사용하면 VSD(Voltage Drive)는 0Hz에서도 모터를 정확하게 제어할 수 있습니다(예: 윈치 작업에서 하중을 정지 상태로 유지하는 경우).
비고: 이글은 https://www.switchcraft.org/learning/2016/12/16/vector-control-for-dummies 번역본 입니다.
'개발 > Motor Inverter' 카테고리의 다른 글
| (3상) 모터 제어 Inverter - SVM, SVPWM TMS320 소스 (4) | 2025.07.23 |
|---|---|
| (3상) 모터 제어 Inverter - 방법 비교 pwm, spwm,svpwm,foc (4) | 2025.07.16 |
| (3상) 모터 Inverter 종류 - SVM, SVPWM - 연재 (7) | 2025.04.03 |
| (3상) 모터 Inverter 종류 - dq 변환 (Clarke + Park 변환) - 연재 (0) | 2025.04.03 |
| (3상) 모터 Inverter 종류 - SPWM, Sinusoidal PWM - 연재 (0) | 2025.04.03 |


