STM32 ADC 는 다음과 같이 3가지로 할 수 있읍니만 여기서는
stm32f207vgt6 을 이용하여 ADC - Polling 방식 샘플 코드를 만들어 봅니다.
1) Polling 방식
> Single Channel, Single Conversion
> Multi Channel, Single Conversion - 본글 https://bahk33.tistory.com/224
2) Interrupt 방식
> Multi Channel, Single Conversion
> Multi Channel, Continuous Conversion - https://bahk33.tistory.com/223
3) DMA 방식
> Multi Channel DMA -- https://bahk33.tistory.com/222
==========================================
1. 사전 준비
다음 사항을 알 고 있으면 좋아요.
1) 프로젝트 만들기
[CubeIDE] stm32 프로젝트 만들기 https://bahk33.tistory.com/45
에서 " 6. compile 때 bin, hex 파일도 만들게 " 까지 하시고,
2) Print 문 쓰기
[CubeIDE] stm32 Uart 살리기 LoopBack, sample source https://bahk33.tistory.com/49
참조 하여 프린트 문 쓸 수 있게 하였읍니다.
2. Analog 입력 3가지 Digital 로 변환 하겠읍니다.
- ADC1-IN8 : PB0
- ADC1-IN9 : PB1
- ADC1 - Temparature Sensor Channel ( CPU 안에 있는 온도 센서 )
1) Pinout & Configuration > Analog 선택 > ADC1 선택 > IN8, IN9, Temparature Sensor Channel 선택

3. ADC1 설정
1) ADC1 - DMA Settings
> DMA 를 쓰지 않아, 설정 하면 안됩니다.
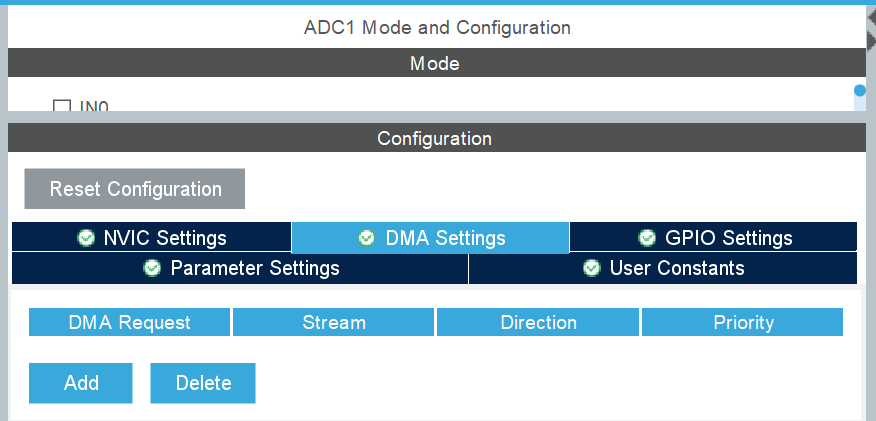
2) ADC1 - Parameter Settings

> Scan conversion mode
여러 채널을 샘플링 하는 경우 scan 모드를 enable 하고 한개 채널만 샘플링 하는 경우 disable 한다.
> Continous conversion mode
계속 샘플링을 진행할 예정이므로 enable 한다.
> Discontinous conversion mode : disable 한다.
> DMA continous requests
DMA 를 쓰지 않으므로 관계 없다
> Sampling time 과 conversion time
3 Cycles
2) ADC1 - NVIC Settings
> 인터럽트를 사용하지 않으므로 그데로 놔 둡니다.

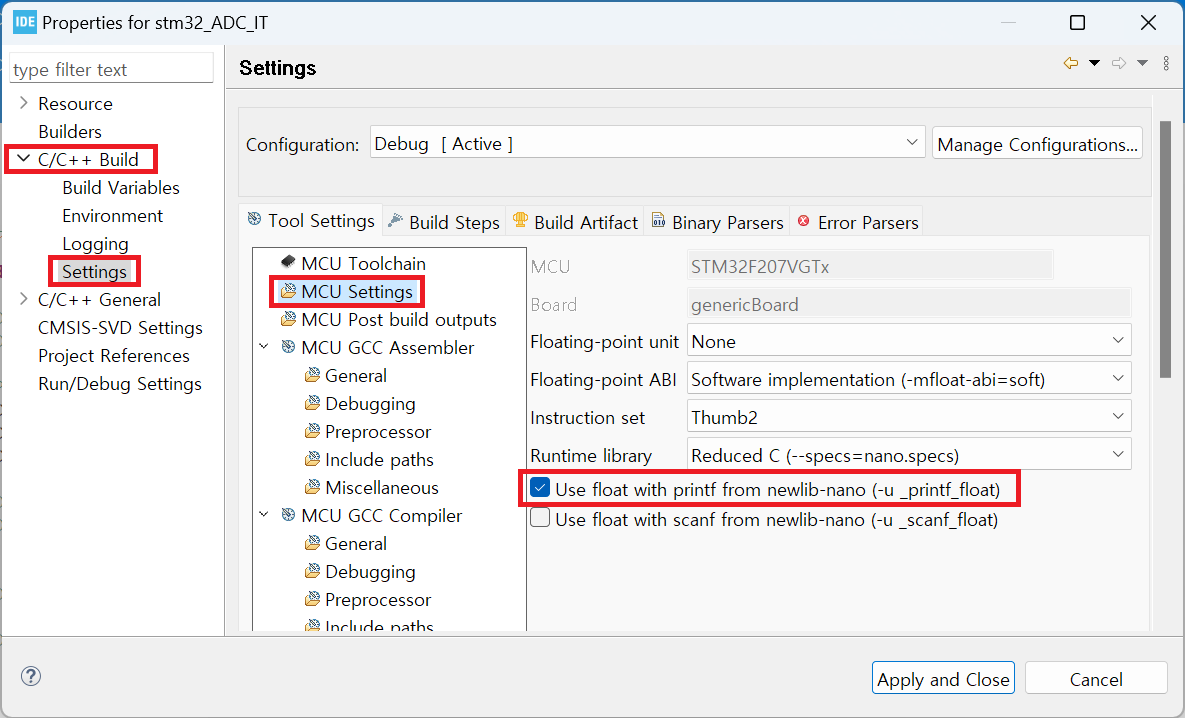
4. float print 를 위한 설정
> Project > Properties 해서 나오는 창
> C/C++ Build > Settings > MCU Settings > Use float ~ 을 체크 합니
5. 코드 만들기
> Project - Generate Code 하시면 코드가 만들어 집니다.
> 만들어 진 코드를 조금 수정한거 첨부 합니다.
1) main.c
// main.c
#include "main.h"
#include <stdio.h>
#define BUF_ADC_SIZE 3
ADC_HandleTypeDef hadc1;
UART_HandleTypeDef huart6;
uint32_t ADC_buf[BUF_ADC_SIZE];
uint32_t ADC_buf2[BUF_ADC_SIZE];
uint8_t flag_adc_finish=0;
float temp;
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_ADC1_Init(void);
static void MX_USART6_UART_Init(void);
int __io_putchar(int ch) { // for printf
if( HAL_UART_Transmit(&huart6, (uint8_t *)&ch, 1, 10) != HAL_OK ) return -1;
return ch;
}
void HAL_ADC_ConvCpltCallback(ADC_HandleTypeDef* hadc)
{
static uint8_t adcIndex =0;
ADC_buf[adcIndex] = HAL_ADC_GetValue(&hadc1);
if(adcIndex == 2)
{
ADC_buf2[0] = 3000 * ADC_buf[0] / 4096;
ADC_buf2[1] = 3000 * ADC_buf[1] / 4096;
ADC_buf2[2] = 3000 * ADC_buf[2] / 4096;
// 내장온도센서 = (Vsens - V25) / 2.5 + 25도
temp = ((float)ADC_buf2[2] - 760.0) / 2.5 + 25.0;
flag_adc_finish= 1;
}
adcIndex++;
if(adcIndex > 2) adcIndex = 0;
}
int main(void)
{
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
MX_ADC1_Init();
MX_USART6_UART_Init();
printf("Start ADC Polling\n");
while (1)
{
HAL_ADC_Start(&hadc1);
HAL_Delay(100);
HAL_ADC_PollForConversion(&hadc1,100);
ADC_buf[0]=HAL_ADC_GetValue(&hadc1);
HAL_ADC_PollForConversion(&hadc1,100);
ADC_buf[1]=HAL_ADC_GetValue(&hadc1);
HAL_ADC_PollForConversion(&hadc1,100);
ADC_buf[2]=HAL_ADC_GetValue(&hadc1);
HAL_ADC_Stop(&hadc1);
ADC_buf2[0] = 3000 * ADC_buf[0] / 4096;
ADC_buf2[1] = 3000 * ADC_buf[1] / 4096;
ADC_buf2[2] = 3000 * ADC_buf[2] / 4096;
// 내장온도센서 = (Vsens - V25) / 2.5 + 25도
temp = ((float)ADC_buf2[2] - 760.0) / 2.5 + 25.0;
printf("1:%ld, 2:%ld, 3:%ld ", ADC_buf[0], ADC_buf[1], ADC_buf[2]);
printf("1:%ld, 2:%ld, 3:%ld, %f\n", ADC_buf2[0], ADC_buf2[1], ADC_buf2[2], temp);
HAL_Delay(500);
}
}
static void MX_ADC1_Init(void)
{
ADC_ChannelConfTypeDef sConfig = {0};
hadc1.Instance = ADC1;
hadc1.Init.ClockPrescaler = ADC_CLOCK_SYNC_PCLK_DIV2;
hadc1.Init.Resolution = ADC_RESOLUTION_12B;
hadc1.Init.ScanConvMode = ENABLE;
hadc1.Init.ContinuousConvMode = ENABLE;
hadc1.Init.DiscontinuousConvMode = DISABLE;
hadc1.Init.ExternalTrigConvEdge = ADC_EXTERNALTRIGCONVEDGE_NONE;
hadc1.Init.ExternalTrigConv = ADC_SOFTWARE_START;
hadc1.Init.DataAlign = ADC_DATAALIGN_RIGHT;
hadc1.Init.NbrOfConversion = 3;
hadc1.Init.DMAContinuousRequests = DISABLE;
hadc1.Init.EOCSelection = ADC_EOC_SINGLE_CONV;
if (HAL_ADC_Init(&hadc1) != HAL_OK)
{
Error_Handler();
}
sConfig.Channel = ADC_CHANNEL_8;
sConfig.Rank = 1;
sConfig.SamplingTime = ADC_SAMPLETIME_3CYCLES;
if (HAL_ADC_ConfigChannel(&hadc1, &sConfig) != HAL_OK)
{
Error_Handler();
}
sConfig.Channel = ADC_CHANNEL_9;
sConfig.Rank = 2;
if (HAL_ADC_ConfigChannel(&hadc1, &sConfig) != HAL_OK)
{
Error_Handler();
}
sConfig.Channel = ADC_CHANNEL_TEMPSENSOR;
sConfig.Rank = 3;
if (HAL_ADC_ConfigChannel(&hadc1, &sConfig) != HAL_OK)
{
Error_Handler();
}
}
static void MX_USART6_UART_Init(void)
{
huart6.Instance = USART6;
huart6.Init.BaudRate = 57600;
huart6.Init.WordLength = UART_WORDLENGTH_8B;
huart6.Init.StopBits = UART_STOPBITS_1;
huart6.Init.Parity = UART_PARITY_NONE;
huart6.Init.Mode = UART_MODE_TX_RX;
huart6.Init.HwFlowCtl = UART_HWCONTROL_NONE;
huart6.Init.OverSampling = UART_OVERSAMPLING_16;
if (HAL_UART_Init(&huart6) != HAL_OK)
{
Error_Handler();
}
}
2) stm32f2xx_hal_msp.c
// stm32f2xx_hal_msp.c
void HAL_ADC_MspInit(ADC_HandleTypeDef* hadc)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
if(hadc->Instance==ADC1)
{
__HAL_RCC_ADC1_CLK_ENABLE();
__HAL_RCC_GPIOB_CLK_ENABLE();
/**ADC1 GPIO Configuration
PB0 ------> ADC1_IN8
PB1 ------> ADC1_IN9
*/
GPIO_InitStruct.Pin = GPIO_PIN_0|GPIO_PIN_1;
GPIO_InitStruct.Mode = GPIO_MODE_ANALOG;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
}
}
void HAL_UART_MspInit(UART_HandleTypeDef* huart)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
if(huart->Instance==USART6)
{
__HAL_RCC_USART6_CLK_ENABLE();
__HAL_RCC_GPIOC_CLK_ENABLE();
/**USART6 GPIO Configuration
PC6 ------> USART6_TX
PC7 ------> USART6_RX
*/
GPIO_InitStruct.Pin = GPIO_PIN_6|GPIO_PIN_7;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH;
GPIO_InitStruct.Alternate = GPIO_AF8_USART6;
HAL_GPIO_Init(GPIOC, &GPIO_InitStruct);
/* USART6 interrupt Init */
HAL_NVIC_SetPriority(USART6_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(USART6_IRQn);
}
}
5. Source 첨부
==========================
수고 하셨읍니다.
도움이 되셨으면, 댓글 부탁합니다. 댓글 하나에 힘이 됩니다.
고맙읍니다.
'개발 > embed' 카테고리의 다른 글
| [CubeIDE] stm32 ADC-Interrupt 사용하기 sample code (0) | 2025.04.15 |
|---|---|
| [CubeIDE] stm32 ADC-DMA 사용하기 sample code (0) | 2025.04.15 |
| EDA, CAD Tool List (0) | 2025.04.07 |
| TMS320 F28069 CCS PWM sample source : TI TMS320입문 (0) | 2025.03.26 |
| TMS320 F28069 CCS SCI(UART) sample source : TI TMS320입문 (0) | 2025.03.21 |

