이전
[CubeIDE] stm32 프로젝트 만들기 https://bahk33.tistory.com/45
[CubeIDE] stm32 프로젝트 만들기
1. 프로젝트 생성때 맨 처음 해야 할일 2가지 - SWD 설정 - 클럭 소스 및 동작 클럭을 설정 2. 프로젝트 만들기 - File => New => STM32 Project - Target Selection 에서 MCU/MPU Selector 탭에서 Part Number 에 CubeIDE 를
bahk33.tistory.com
에 이어 Uart 살리고, LoopBack 을 한다.
1. PinOut View 에서
- PA9 : USART1_TX, PA10: USART1_RX, PA2:Usart2_Tx, PA3:Usart2_Rx 로 설정 하고,
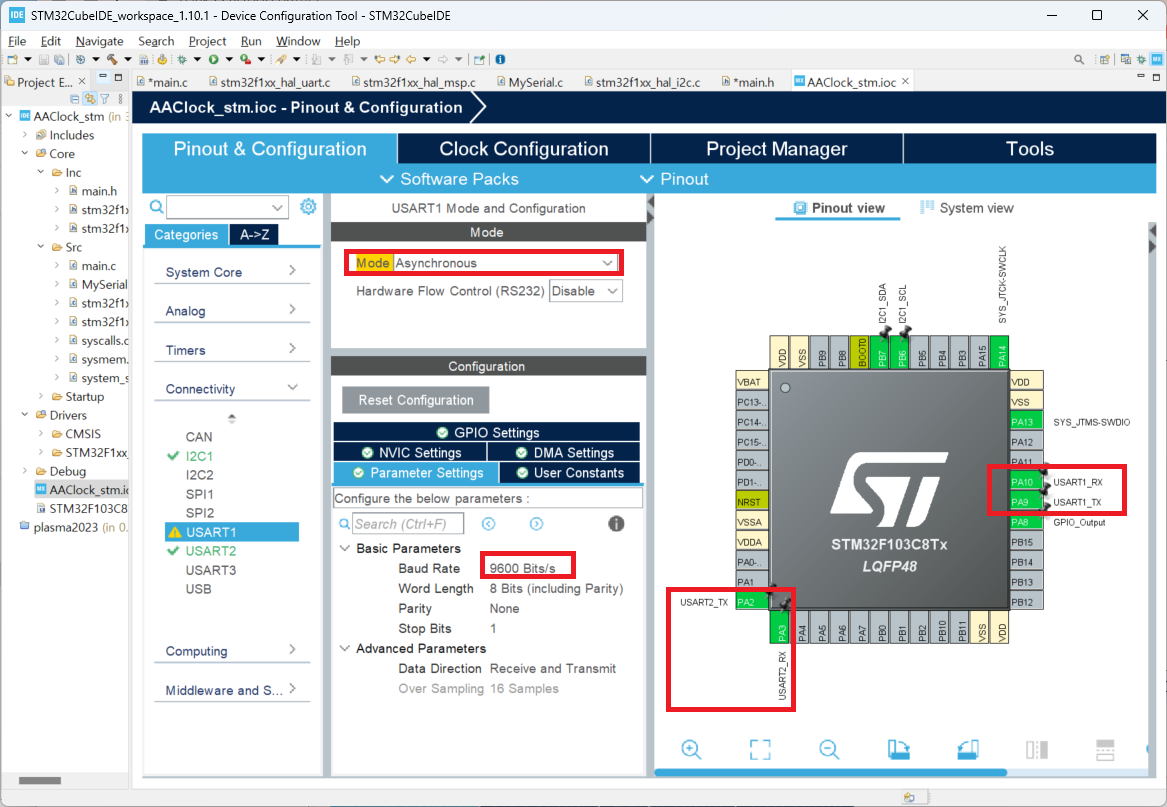
2 Categories - Connectivity - USART1/ USART2 둘다 같이 설정 한
- Mode : Asynchronous
- Configuration - GPIO Settings - Parameter Settings - Baud Rate : 9600 Bits/s
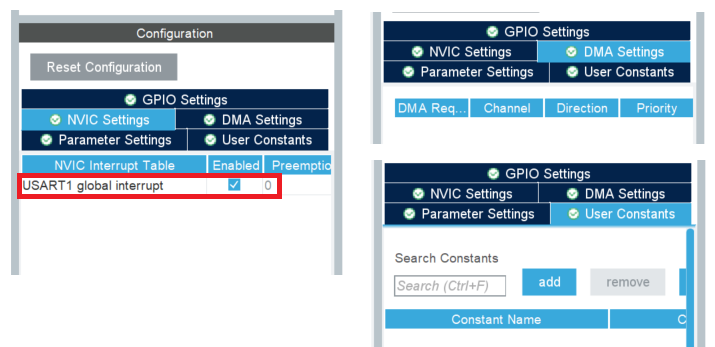
- Configuration - GPIO Settings - NVIC Interrupt Table - USART1 global interrupt 를 체크 한다
3. 다 했으면, 왼쪽 프로젝트명( 여기서는 AAClock_stm ) 에서 마우스 오른쪽 버튼 눌러 Buil Project 한다.
4. main.c 의 앞 부분
/* Private variables ---------------------------------------------------------*/
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_I2C1_Init(void);
static void MX_TIM1_Init(void);
static void MX_USART1_UART_Init(void);
static void MX_USART2_UART_Init(void);
/* USER CODE BEGIN PFP */
와 같은 부분에 내가 만들 함수 정의 를 추가하여 아래와 같이 만듭니다.
/* Includes ------------------------------------------------------------------*/
#include "main.h"
/* Private variables ---------------------------------------------------------*/
I2C_HandleTypeDef hi2c1;
TIM_HandleTypeDef htim1;
UART_HandleTypeDef huart1;
UART_HandleTypeDef huart2;
void Serial_Init(void); // serial port 초기화
void Serial_get1(void); // serial port1 에서 읽기
void Serial_get2(void); // serial port2 에서 읽기
unsigned char rBuf[100]; // 읽는 거 저장 할 곳
/* USER CODE BEGIN PV */
void MyTaskInit(){ // 초기화 할때 , 부를 함수 정의
Serial_Init();
}
void MyTask(){
Serial_get1(); // 처리 함수
Serial_get2();
}
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_I2C1_Init(void);
static void MX_TIM1_Init(void);
static void MX_USART1_UART_Init(void);
static void MX_USART2_UART_Init(void);
/* USER CODE BEGIN PFP */
5. main.c 의 main() 에 할일 정의
int main(void)
{
// 초기화 부분
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* Configure the system clock */
SystemClock_Config();
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_I2C1_Init();
MX_TIM1_Init();
MX_USART1_UART_Init();
MX_USART2_UART_Init();
/* USER CODE BEGIN 2 */
MyTaskInit();
/* USER CODE END 2 */
// 무한 룹 부분
/* Infinite loop */
while (1)
{
MyTask();
}
}
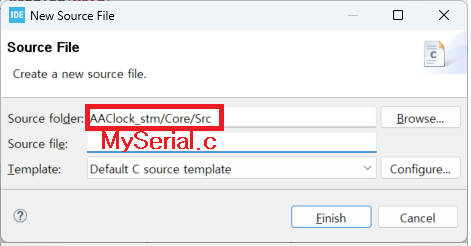
6. MySerial.c 만들기
- Project 에서 마우스 오른쪽 버튼 눌러
- New -Source File - 하여 ~Core/Src Folder 에 MySerial.c - [Finish]
- 아래 내용 입력
/*
* MySerial.c
* Created on: 2023. 7. 13.
* Author: b
*/
#include "main.h"
#define RXBUFSIZE 1024
typedef struct {
uint32_t head, tail;
volatile uint32_t nBytes; // 이것은 int 안에서 , 밖에서 다 바뀌므로 , volatile 로 해 줘야.. 그런데... 안해도 되는거 같은..
uint8_t buf[RXBUFSIZE], d;
} QUart, *pQUart;
QUart q1uart,
QUart q2uart;
extern UART_HandleTypeDef huart1;
extern UART_HandleTypeDef huart2;
// printf 문을 쓰기 위해 설정 : __weak 로 설정된 __io_putchar 함수 재 정의
int __io_putchar(int ch)
{
if(HAL_UART_Transmit(&huart2, (uint8_t *)&ch, 1, 10) != HAL_OK) return -1;
return ch;
}
void InitUartQueue(pQUart pQueue) { // 큐 초기화
pQueue->nBytes = pQueue->head = pQueue->tail = 0;
}
void Serial_Init(void) {
InitUartQueue(&q1uart); // 큐 초기화
InitUartQueue(&q2uart);
HAL_UART_Receive_IT(&huart1, &q1uart.d, 1); // 이거 한번 먼저 해줘야 , 1개 들어오면 인터럽트 발생 시켜라
HAL_UART_Receive_IT(&huart2, &q2uart.d, 1);
}
static void MinusByte1(pQUart pQueue) { // 큐에서 1바이트 뺐다고 기록
pQueue->tail = (pQueue->tail == (RXBUFSIZE - 1)) ? 0 : (pQueue->tail + 1);
pQueue->nBytes--;
}
// 대문자로 바꾸기 보기 0x65 -> 0x45 ( 'e' -> 'E' )
uint8_t toUpper(uint8_t d) { if ( d>0x60 && d<0x7B ) d &= ~0x20; return d;}
void Serial_get1() { // parsing COM1 packet
uint8_t d;
while (q1uart.nBytes) { // 받은 문자 개수가 0보다 크면, 계속 빼줌
d = q1uart.buf[q1uart.tail]; // 맨 먼저 받은거 저장
// 혹시 나중에 필요 하다면, 여기서 받은 스트링 처리 하면 된다.
// 여기서는 대문자로 바꾸어 LoopBack
d = toUpper(d); // 대문자로 바꾸고,
HAL_UART_Transmit(&huart1, &d, 1, 10); // printf("-%c", d); 보내기
MinusByte1(&q1uart); // 한글자 뺏다고 기록
}
}
void Serial_get2() { // parsing COM2 packet
uint8_t d;
while (q2uart.nBytes) { // 계속 빼줌
d = q2uart.buf[q2uart.tail];
HAL_UART_Transmit(&huart2, &d, 1, 10); // printf("-%c", d);
MinusByte1(&q2uart);
}
}
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart) { // 이 함수 안에 print 문 절대넣지 말것.. 동작 잘 안됨.
pQUart pQ;
if (huart->Instance == USART1) { // 뭐가 COM1로 왔으면
pQ = &q1uart;
if (pQ->nBytes < RXBUFSIZE) // 넘으면 버림. 빨리 0빼줘야 함.
{
pQ->buf[pQ->head] = pQ->d; // 버퍼에 받은 1 byte 넣기..
pQ->head = (pQ->head == (RXBUFSIZE - 1)) ? 0 : (pQ->head + 1); // 넣을 위치 갱신
pQ->nBytes++; // 넣은 개수 1 추가
}
HAL_UART_Receive_IT(huart, &(pQ->d), 1); // 1 byte receive 재설정
}
else if (huart->Instance == USART2) {
pQ = &q2uart;
if (pQ->nBytes < RXBUFSIZE) // 넘으면 버림. 빨리 빼줘야 함.
{
pQ->buf[pQ->head] = pQ->d; // 1 byte 넣기..
pQ->head = (pQ->head == (RXBUFSIZE - 1)) ? 0 : (pQ->head + 1);
pQ->nBytes++;
}
HAL_UART_Receive_IT(huart, &(pQ->d), 1); // 1 byte receive
}
}
7. Project - Build Project 하면 된다.
8. Down Load 하여 Uart 1 이 loopBack ( 받은거 되돌려 주기 , 소문자는 대문자로 바꿔서 ) 이 된다.
9. 설명이 좀 모자라지만, 첨부 소스 보시고 해보셔요.
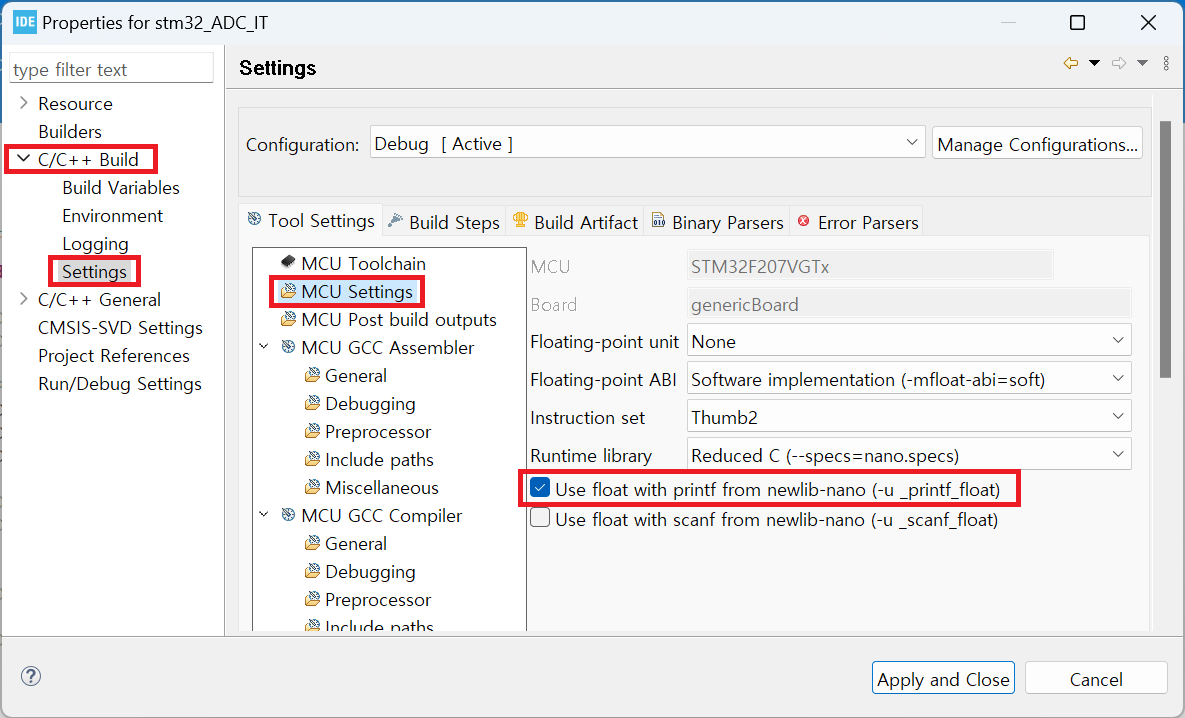
10. float print 를 위한 설정
> Project > Properties 해서 나오는 창
> C/C++ Build > Settings > MCU Settings > Use float ~ 을 체크 합니
'개발 > STM8 STM32' 카테고리의 다른 글
| [CubeIDE] stm32 Uart Printf, sample source (0) | 2023.07.14 |
|---|---|
| [CubeIDE] stm32 I2C 로 TLC59116 [LED Drv] 와 통신, sample source (0) | 2023.07.13 |
| STM32 UART로 FW 다운로드 (0) | 2023.07.13 |
| [CubeIDE] stm32 프로젝트 만들기 (0) | 2023.07.13 |
| STM32 CubeIDE I2C sample source code (0) | 2023.05.22 |

