CAN 통신 테스트 하기 위해 국산 알아 보니 30 만원...
중국에서 알아보니 2~3 만원
usb to can 장비와, 프로그램을 준비 하면
PC 에서 내가 만든 CAN 장비로 통신을 주고 받을수 있다.
1. Canable 장치 연
https://www.aliexpress.com/af/canable.html 에서 골라 사셔요.
aliexpress.com/item/1005004969523882.html 에서 산거 테스트 해보니 잘 됨
대충 14 usd + 택비 3 usd = 17 usd :2022 년 12월 현재


120 m 터미널 저항은 마지막 단이면 해야 하는데, 뭐 되면 되니까, 끼고 빼고 다 해 보셔요
2. CANable 프로그램 Download
https://canable.io/getting-started.html 에서 cangaroo-win32-4fb8cf8.zip
를 받아 풀고. 장비 연결뒤 Cangaroo 를 실행 한다.

Measurement - Start Measurement (F5) 를 선택 하면 연결된 장비가 보인다. 장비는 별도 드라이버를 깔지는 않았다.
Win 11 사용중
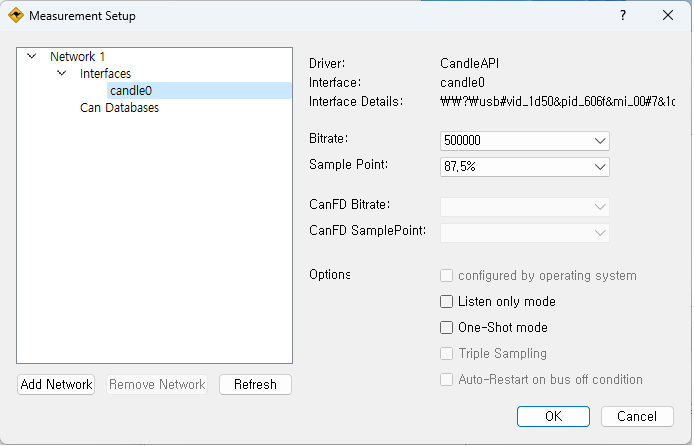
연결한 장비 (candle0) 를 선택 하고, 비트레이트 를 정한뒤 [ok] 한다

송신 데이타 ( address, DataLength, data) 를 대충 쓰고 [Send] 버튼 누르면 데이타가 나간다.
내 장비에서 받는지 확인
뭐 내 장비에서 보내고,, 이캉가루 프로그램에서 받는지 확인.
보드레이트 등 잘 설정이 되어 있으면, 주고 받고 잘 된다.
뭐 하다 보니, 내가 만들어 써도 될거 같은 프르그램은 serial 통신 프로그램 쓰고,,
즐거운 시간 되셔요
doc 은 위 내용 과 같은거
캉가루는 내가 다운 받아 쓴거
참고로 내가 테스트 한 Nuvoton 보드 연결 방법
{
printf("\n\n");
printf("+------------------------------------------------------------------------+\n");
printf("| About CAN sample code configure |\n");
printf("+------------------------------------------------------------------------+\n");
printf("| The sample code provide a simple sample code for you study CAN |\n");
printf("| Before execute it, please check description as below |\n");
printf("| |\n");
printf("| 1.CAN0 and CAN1 connect to the same CAN BUS |\n");
printf("| 2.Using UART0 as print message port(Both of NUC472/442 module boards)|\n");
printf("| |\n");
printf("| |--------| |\n");
printf("| | |-------->|---------------------------------------| | |\n");
printf("| | |CAN0_TX | | | |\n");
printf("| | NUC472 | | | PC | |\n");
printf("| | NUC442 |<------------|-----------------------------------| | |\n");
printf("| | |CAN0_RX | | | | |\n");
printf("| | | | | |\n");
printf("| | | | | CAN0: MSG(0), STD 0x7FF |\n");
printf("| | | | | MSG(5), EXT 0x12345 |\n");
printf("| | |-------->| | MSG(31), EXT 0x7FF01 |\n");
printf("| | |CAN1_TX | |\n");
printf("| | | | CAN1: MSG(1), STD 0x7FF |\n");
printf("| | |<------------| MSG(6), EXT 0x12346 |\n");
printf("| | |CAN2_RX MSG(30), EXT 0x7FF02 |\n");
printf("| |--------| |\n");
printf("| | |\n");
printf("| | |\n");
printf("| V |\n");
printf("| UART0 |\n");
printf("|(print message) |\n");
printf("+------------------------------------------------------------------------+\n");
}
테스트 한 소스 추가
'개발 > 통신' 카테고리의 다른 글
| com(serial rs232) port plot chart 화면에 그림 그리기 모음 (0) | 2023.04.04 |
|---|---|
| serial(rs232, rs485), LAN(tcp, udp)통신 Terminal 모음 (0) | 2023.01.09 |
| Win TCP (UDP) Client ,Server , example Source code (0) | 2023.01.09 |
| Nuvoton M054 - Wiznet ioLibrary 사용하여 W5200 연결 하기 (0) | 2023.01.06 |
| TCP_UDP_Debugger : tcp udp test program 1 (0) | 2022.12.30 |



